机器人资讯
资料免费下载
视频教程
机器人维修论坛
BBS
搜索
搜索
本版
帖子
用户
本版
帖子
用户
请
登录
后使用快捷导航
没有帐号?
立即注册
道具
勋章
任务
日志
门户
设置
锟揭碉拷锟秸诧拷
退出
锟斤拷讯QQ
微锟脚碉拷录
工业机器人维修技术论坛
»
机器人维修论坛
›
技术支持
›
维修案例分享
›
机器人伺服驱动器常见的故障分析和处理方法
返回列表
扫一扫
手机浏览
查看:
2666
|
回复:
5
机器人伺服驱动器常见的故障分析和处理方法
[复制链接]
光妹
光妹
当前离线
积分
52
8
主题
8
帖子
52
积分
注册会员
积分
52
发消息
电梯直达
楼主
发表于 2017-3-20 15:18:15
|
显示全部楼层
|
倒序浏览
|
阅读模式
机器人伺服驱动器调试过程过电压过电流是两个比较常见的故障,下面就这两个故障做些分析,更好的帮助调试人掌握故障的基理及产生的原因,能够较快的了解故障点排除故障,让设备能尽早投入运行。
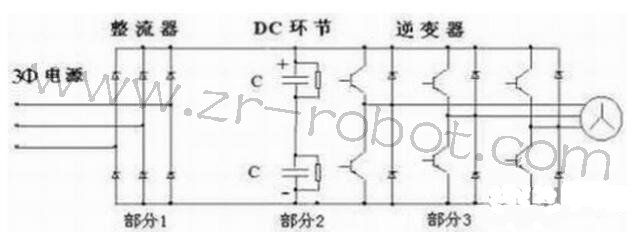
一:过电压故障,这里所指的电压常指直流母线电压,图一是常见市场机器人伺服驱动器主回路电路,P和N之间的电压就是直流母线电压。
图一
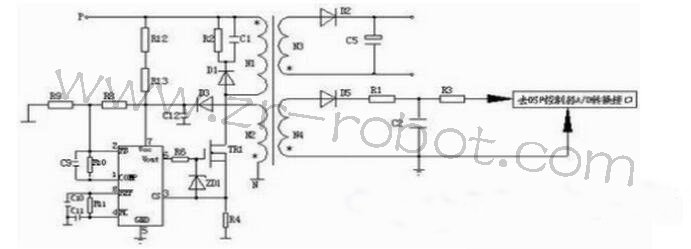
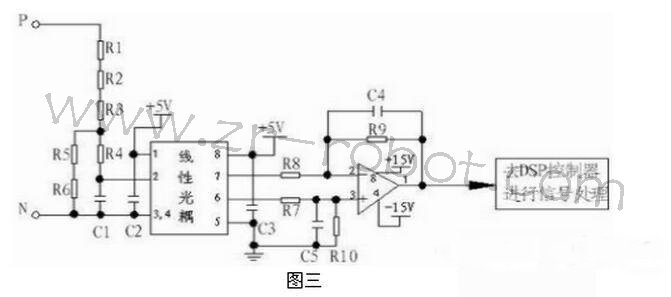
直流母线电压的读取,机器人伺服驱动器CPU无法读取很高的电压,所以必需得通过电路转化将高电压转化为CPU可以读取的低电压,常见的有变压器输出读取法和电阻降压读取法,见图二,图三。
图二
从上述原理图分析,过电压产生第一种是种种原因造成的机器人伺服驱动器C和D之间电压高于额定电压,在过电压发生时,直流母线的储能电容将被充电,当电压升至760V(此值有些机器人伺服驱动器可调)左右时,机器人伺服驱动器过电压保护动作,第二种情况是检测电路出现故障,正常的电压值被检测电路读成过电压或读成欠电压。
收藏
0
【工业机器人维修,机器人保养。 24小时紧急维修,问题解答,免费检测。 请拔打15889988091】
使用道具
举报
照妖镜
返回列表









 发表于 2017-3-20 15:18:15
发表于 2017-3-20 15:18:15

 收藏
收藏 照妖镜
照妖镜