|
|
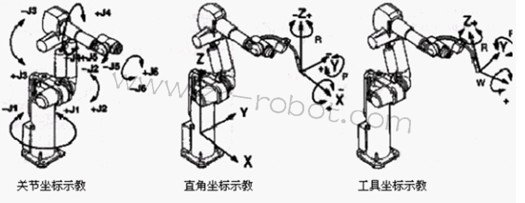
1.示教模式(见表1,图1)
表1
关节坐标示教(Joint) 通过TP上相应的键转动机器人的各个轴示教
直角坐标示教(XYZ) 沿着笛卡儿坐标系的轴直线移动机器人,分两种坐标系:
1)通用坐标系(World):机器人缺省的坐标系
2)用户坐标系(User):用户自定义的坐标系
工具坐标示教(Tool) 沿着当前工具坐标系直线移动机器人。工具坐标系是匹配在工具方向上的笛卡儿坐标系
设置示教模式,按TP上的COORD键进行选择。
屏幕显示 JOINT→JOG→TOOL→USER→JOINT
状态指示灯 JOINT→XYZ→TOOL→XYZ→JOINT
2.设置示教速度
按TP上的示教速度键进行设置。
示教速度键 VFINE→FINE→1%→5%→50%→100%
VFINE到5%之间,每按一下,改变1%
5%到100%之间,每按一下,改变5%
SHIFT键+示教速度键 VFINE→FINE→1%→5%→50%→100%
注意:开始的时候,示教速度尽可能的低一些,高速度示教,有可能带来危险。
3.示教
(1)按下Deadman 开关,将TP开关置于ON
(2)按下SHIFT键的同时,按示教键开始机器人示教。SHIFT键和示教键的任何一个松开,机器人就会停止运动。
注意:示教机器人人前,请确认工作区域内没有人。
|
|









 发表于 2017-4-17 08:10:34
发表于 2017-4-17 08:10:34

 收藏
收藏 照妖镜
照妖镜